
Метка "magnetic"
Miniature
LIR-MI108A
The series of the smallest rotary encoders! Miniature magnetic incremental rotary encoder. Case diameter is only 8 mm, solid shaft diameter is 3 mm.
ПерейтиLIR-MI208A
The series of the smallest rotary encoders! Miniature magnetic incremental rotary encoder. Case diameter is only 8 mm, hollow shaft diameter is 2 or 3 mm.
ПерейтиLIR-MI208B

The series of the smallest rotary encoders! Miniature magnetic incremental rotary encoder with an external elastic element. Case diameter is only 8 mm, hollow shaft diameter is 2 or 3 mm.
ПерейтиLIR-MI212A

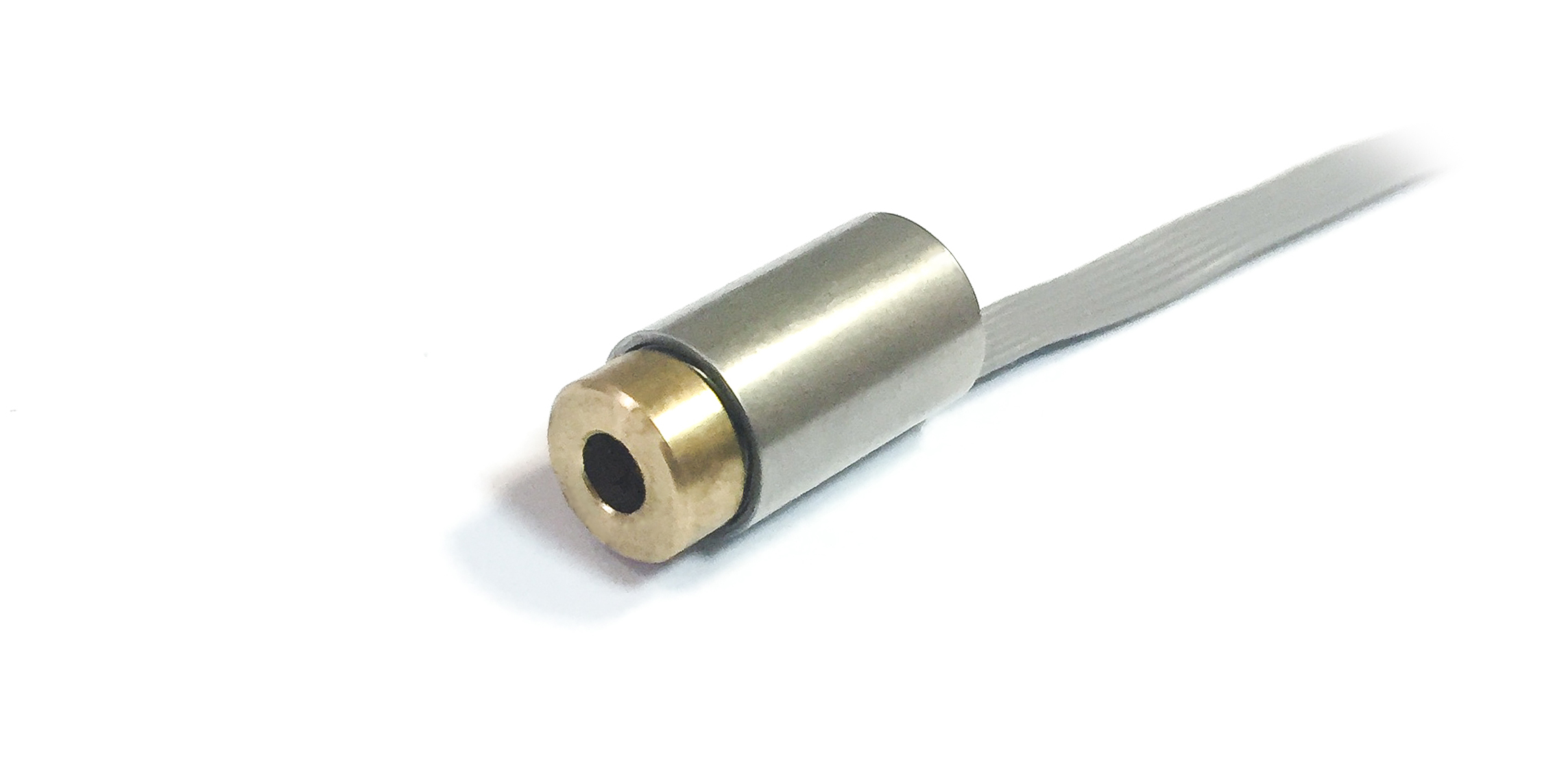
Miniature magnetic incremental rotary encoder. Case diameter is 12 mm, hollow shaft diameter is 3 mm. Flat cable.
ПерейтиLIR-MI212B

Miniature magnetic incremental rotary encoder with an external elastic element. Case diameter is 12 mm, hollow shaft diameter is 3 mm. Flat cable.
ПерейтиLIR-MI212V
Miniature magnetic incremental rotary encoder with a cylindrical split coupling. Case diameter is 12 mm, hollow shaft diameter is 3 mm. Flat cable.
ПерейтиLIR-MA212A

Miniature angular magnetic absolute encoder fit onto the shaft. Case diameter 12 mm, diameter of the hollow shaft 3 mm, flat cable. Data Board located in the housing. The resolution is 1 bit more than the LIR-МА208Е.
ПерейтиLIR-MA208A
Out of production. The smallest angular magnetic absolute encoder! Fit on the shaft. Case diameter of only 8 mm, the diameter of the hollow shaft 2 mm or 3 mm. data Board placed on the flat cable.
ПерейтиCompact
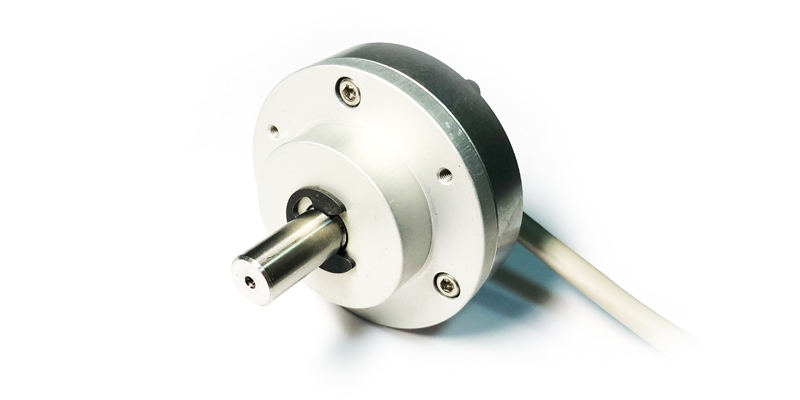
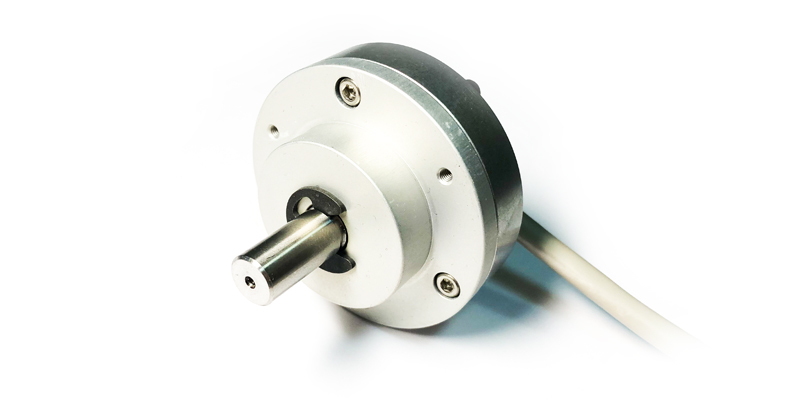
LIR-MI137A

Magnetic incremental rotary encoder for general industrial use. Case diameter is 36.5 mm, solid shaft diameter is 6 mm. Synchro flange.
ПерейтиLIR-MI137B

Magnetic incremental rotary encoder for general industrial use. Case diameter is 36.5 mm, solid shaft diameter is 6 mm. Clamping flange.
ПерейтиLIR-MI137Zh

Magnetic incremental rotary encoder for general industrial use. Case diameter is 36.5 mm, solid shaft diameter is 6 mm. IP67 protection class.
ПерейтиLIR-MI237A
Magnetic incremental rotary encoder for general industrial use. Case diameter is 36.5 mm, hollow shaft diameter is 3 mm.
ПерейтиLIR-MI237B
Magnetic incremental rotary encoder for general industrial use. Case diameter is 36.5 mm, hollow shaft diameter is 3 mm.
ПерейтиLIR-MM137A
Multi-turn magnetic absolute encoder for General industrial use with a mechanical gearbox. Case diameter 38 mm diameter solid shaft 6 mm.
ПерейтиLIR-MM137B
Multi-turn magnetic absolute encoder for General industrial use with a mechanical gearbox. Case diameter 36.5 mm diameter solid shaft 6 mm Pilot flange similar Hengstler AC36.
ПерейтиLIR-MM238A
Multi-turn magnetic absolute encoder for general industrial use with a mechanical gearbox. Hull diameter 38 mm, through hollow shaft diameter 6 mm.
ПерейтиLIR-MA137A

Angular magnetic absolute encoder for General industrial use. Case diameter 36.5 mm diameter solid shaft 6 mm.
ПерейтиLIR-MA137Zh

Angular magnetic absolute encoder for General industrial use. Case diameter 36.5 mm diameter solid shaft 6 mm protection Degree IP67.
ПерейтиLIR-MS137A

Angular magnetic encoder for General industrial applications with a sawtooth output signal for automation systems that require data transmission over large distances. Case diameter 36.5 mm, diameter of shaft 6 mm Synchro flange.
ПерейтиLIR-MS137B

Angular magnetic encoder for General industrial applications with a sawtooth output signal for automation systems that require data transmission over large distances. Case diameter 36.5 mm, shaft diameter 6 mm Flange clamp type.
ПерейтиLIR-MI124A

Magnetic incremental rotary encoder for general industrial use. Case diameter is 24 mm, solid shaft diameter is 4 mm.
ПерейтиLIR-MS137Zh

Angular magnetic encoder for General industrial applications with a sawtooth output signal for automation systems that require data transmission over large distances. Case diameter 36.5 mm, shaft diameter 6 mm Degree of protection IP67.
ПерейтиLIR-MS237A
Angular magnetic encoder for General industrial applications with a sawtooth output signal for automation systems that require data transmission over large distances. Fit on the shaft. Case diameter 36.5 mm, diameter of the hollow shaft 3 mm.
ПерейтиLIR-MS237B
Angular magnetic encoder for General industrial applications with a sawtooth output signal for automation systems that require data transmission over large distances. Fit on the shaft. Case diameter 36.5 mm, diameter of the hollow shaft 3 mm.
ПерейтиIndustrial
LIR-MI142A
Magnetic incremental rotary encoder for general industrial use. Case diameter is 42 mm, solid shaft diameter is 6 mm.
ПерейтиLIR-MI142B
Magnetic incremental rotary encoder for general industrial use. Case diameter is 42 mm, solid shaft diameter is 6 mm.
ПерейтиLIR-MI150A
Magnetic incremental rotary encoder for general industrial use. Case diameter is 50 mm, solid shaft diameter is 6 mm.
ПерейтиLIR-MI150B
Magnetic incremental rotary encoder for general industrial use. Case diameter is 50 mm, solid shaft diameter is 6 mm.
ПерейтиLIR-MI158A

Magnetic incremental rotary encoder for general industrial use. Case diameter is 58 mm, solid shaft diameter is 6 mm. Synchro flange corresponds to ROD 426 and ROD 456 standards. IP65 protection class.
ПерейтиLIR-MI158D
.jpeg)
Magnetic incremental rotary encoder for general industrial use. Case diameter is 58 mm, solid shaft diameter is 10 mm. Сlamping flange corresponds to ROD 420 and ROD 450 standards. IP65 protection class.
ПерейтиLIR-MI158Zh
Heavy-duty magnetic incremental rotary encoder. Case diameter is 58 mm, solid shaft diameter is 6 mm. Synchro flange corresponds to ROD 426 and ROD 456 standards. IP67 protection class.
ПерейтиLIR-MI158L
Heavy-duty magnetic incremental rotary encoder. Case diameter is 58 mm, solid shaft diameter is 10 mm. Clamping flange corresponds to ROD 420 and ROD 450 standards. IP67 protection class.
ПерейтиLIR-MM158A
Optoelectronic multi-turn absolute encoder for General industrial use with a mechanical gearbox. Case diameter 38 mm diameter solid shaft 4 mm.
ПерейтиLIR-MS158A

Angular magnetic encoder for General industrial applications with a sawtooth output signal. Housing diameter 58 mm shaft diameter 6 mm Synchro flange similar to ROD 426 and ROD 456. Degree of protection IP65.
ПерейтиLIR-MS158D
.jpeg)
Angular magnetic encoder for General industrial applications with a sawtooth output signal for automation systems that require data transmission over large distances. Housing diameter 58 mm shaft diameter 10 mm Clamping flange. Degree of protection IP65.
ПерейтиLIR-MS158Zh
.jpeg)
Angular magnetic encoder for General industrial applications with a sawtooth output signal for automation systems that require data transmission over large distances. Housing diameter 58 mm shaft diameter 6 mm Synchro flange. Degree of protection IP67.
ПерейтиLIR-MS158L
Angular magnetic encoder for General industrial applications with a sawtooth output signal for automation systems that require data transmission over large distances. Housing diameter 58 mm shaft diameter 10 mm Clamping flange. Degree of protection IP67.
Перейти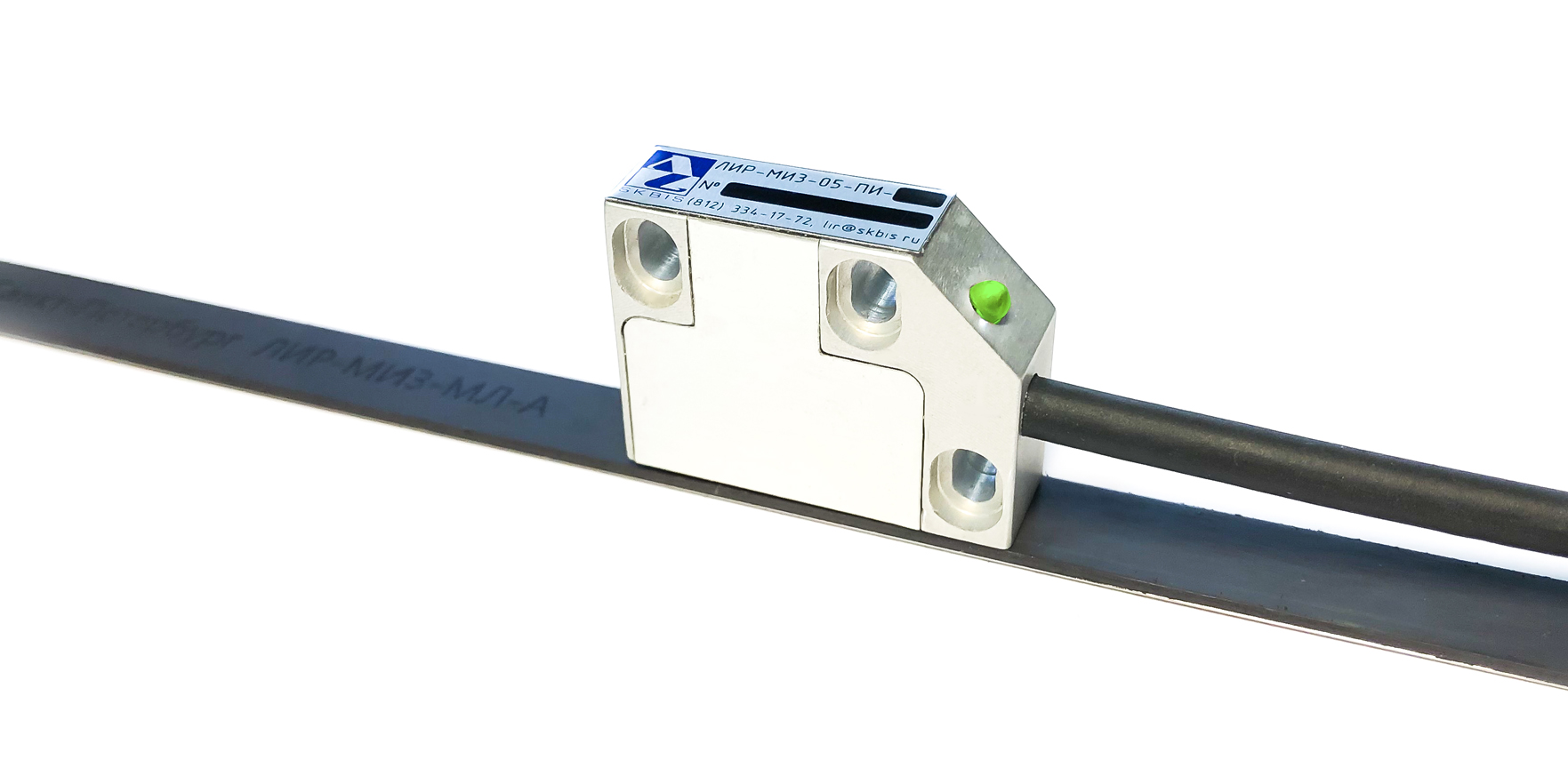
LIR-MI3-RM
Stick-on reference mark of our own production for the LIR-MI3 magnetic contactless incremental system.
ПерейтиLIR-MI3-PR
Applicator tool for mounting and positioning the LIR-MI3-RM reference marks at the poles of the magnetic scale.
ПерейтиLIR-MI3.301 Profile
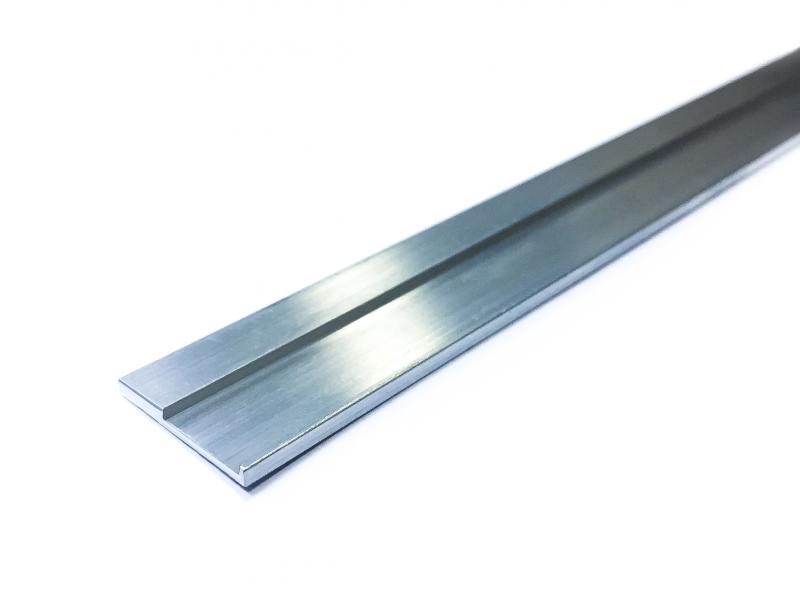
Protective aluminum profile for the magnetic scale, which can also serve as a base for its mounting.
Перейти
LM10

Magnetic contactless incremental linear encoder from our partners RLS, Slovenia. Consists of a readhead and a self-adhesive magnetic scale.
Перейти
LM10ARM
Applicator tool for mounting and positioning the LM10SRM reference marks at the poles of the magnetic scale.
ПерейтиLM10SRM
Stick-on reference mark that is placed directly on the surface of the magnetic scale.
ПерейтиLM10 Protective profile
Protective aluminum profile for the magnetic scale, which can also serve as a base for its mounting.
ПерейтиLIR-MI601A
Incremental magnetic flywheel drive 100 clicks to manually control the displacement coordinate.
ПерейтиLIR-MI601B
Incremental magnetic flywheel drive 100 clicks to manually control the displacement coordinate. Flange for surface mounting.
ПерейтиLIR-MI601E
Incremental magnetic flywheel drive 100 clicks to manually control the displacement coordinate. Convenient connection turn the terminal block.
ПерейтиLIR-MI601Zh
Incremental magnetic flywheel drive 100 clicks to manually control the displacement coordinate. Flange for surface mounting. Convenient connection via terminal block.
Перейти